Autonomous Car for Indian Terrain
DOI:
https://doi.org/10.58190/imiens.2022.3Keywords:
Autonomous Vehicle (AV), Convolutional neural network, Deep learning, Neural NetworkAbstract
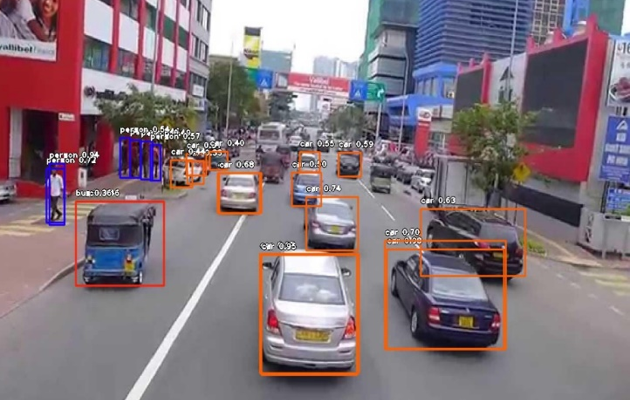
In recent years, autonomous vehicle (AV) technology has improved dramatically. Self-driving cars have the potential to transform urban mobility in India by offering sustainable, convenient, and congestion-free transportation. However, India confronts challenges such as potholes and the need for enhanced lane detection to make autonomous vehicles a reality. The project's central goal is to create a Convolution Neural Network (CNN) model that can scan and identify its surroundings and move. This paper proposes a project which is accomplished by training CNN with a dataset of images and videos to perform advanced lane identification, pothole recognition, and sophisticated object detection.
Downloads
References
N. Sanil, P. A. N. venkat, V. Rakesh, R. Mallapur and M. R. Ahmed, "Deep Learning Techniques for Obstacle Detection and Avoidance in Driverless Cars," 2020 International Conference on Artificial Intelligence and Signal Processing (AISP), 2020, pp. 1-4, doi: 10.1109/AISP48273.2020.9073155.
Chirag Sharma , S. Bharathiraja , G. Anusooya, “Self Driving Car using Deep Learning Technique”, International Journal of Engineering Research & Technology (IJERT) Volume 09, Issue 06 (June 2020).
P. Cai, H. Wang, H. Huang, Y. Liu and M. Liu, "Vision-Based Autonomous Car Racing Using Deep Imitative Reinforcement Learning," in IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7262-7269, Oct. 2021, doi: 10.1109/LRA.2021.3097345.
I. Sonata, Y. Heryadi, L. Lukas, και A. Wibowo, ‘Autonomous car using CNN deep learning algorithm’, Journal of Physics: Conference Series, τ. 1869, τχ. 1, σ. 012071, Απριλίου 2021.
Y. Valeja, S. Pathare, D. Patel and M. Pawar, "Traffic Sign Detection using Clara and Yolo in Python," 2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS), 2021, pp. 367-371, doi: 10.1109/ICACCS51430.2021.9442065.
N. Banupriya, S. Saranya, R. Swaminathan, S. Harikumar, και S. Palanisamy, ‘Animal detection using deep learning algorithm’, J. Crit. Rev, τ. 7, τχ. 1, σσ. 434–439, 2020.
C. Koch and I. Brilakis, “Pothole detection in asphalt pavement images,” Advanced Engineering Informatics, 01-Feb-2011. [Online].
B. -H. Lin and S. -F. Tseng, "A predictive analysis of citizen hotlines 1999 and traffic accidents: A case study of Taoyuan city," 2017 IEEE International Conference on Big Data and Smart Computing (BigComp), 2017, pp. 374-376, doi: 10.1109/BIGCOMP.2017.7881696.
D. O'Carroll, “For the love of pizza, Domino's is now fixing potholes in roads,” Stuff, 12-Jun-2018. [Online]. Available: https://www.stuff.co.nz/motoring/104643123/for-the-love-of-pizza-dominos-is-now-fixing-potholes-in-roads. [Accessed: 30-Oct-2022].
S. Uchida, S. Ide, B. K. Iwana and A. Zhu, "A Further Step to Perfect Accuracy by Training CNN with Larger Data," 2016 15th International Conference on Frontiers in Handwriting Recognition (ICFHR), 2016, pp. 405-410, doi: 10.1109/ICFHR.2016.0082.
M. Egmont-Petersen, D. de Ridder, and H. Handels, “Image processing with neural networks-A Review,” Pattern Recognition, 19-Jun-2002. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0031320301001789. [Accessed: 30-Oct-2022].
Y. Li, “Reinforcement learning in practice: Opportunities and challenges,” arXiv.org, 22-Apr-2022. [Online]. Available: https://arxiv.org/abs/2202.11296v2. [Accessed: 30-Oct-2022].
Published
Issue
Section
License
Copyright (c) 2022 Intelligent Methods In Engineering Sciences

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
How to Cite